

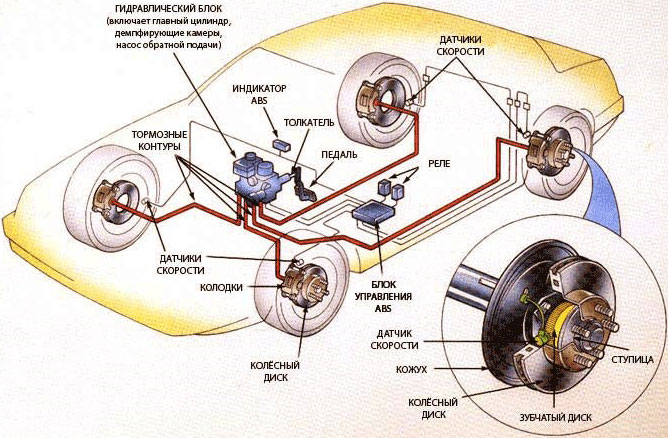
Հակակողպման արգելակման համակարգը (ABS) վերահսկում է մեքենայի շարժման պարամետրերը մեկ կամ մի քանի անիվների վրա տեղադրված սենսորների ընթերցումների համաձայն:Իմացեք, թե ինչ է ABS սենսորը և ինչու է այն անհրաժեշտ, ինչ տեսակներ է այն, ինչպես է այն աշխատում և ինչ սկզբունքների վրա է հիմնված դրա աշխատանքը - պարզեք հոդվածից:
Ինչ է ABS սենսորը
ABS սենսորը (նաև ավտոմոբիլային արագության ցուցիչ, DSA) տրանսպորտային միջոցների անիվի պտտման արագության (կամ արագության) ոչ կոնտակտային սենսոր է, որը հագեցած է տարբեր էլեկտրոնային ակտիվ անվտանգության համակարգերով և օժանդակ կառավարման համակարգերով:Արագության սենսորները հիմնական չափիչ տարրերն են, որոնք ապահովում են հակաբլոկային արգելակման համակարգի (ABS), կայունության կառավարման համակարգի (ESC) և ձգման հսկողության աշխատանքը:Բացի այդ, սենսորային ընթերցումները օգտագործվում են որոշ ավտոմատ փոխանցման կառավարման համակարգերում, անվադողերի ճնշման չափման, հարմարվողական լուսավորության և այլնի մեջ:
Բոլոր ժամանակակից մեքենաները և շատ այլ անիվավոր մեքենաներ հագեցած են արագության տվիչներով:Մարդատար մեքենաների վրա սենսորները տեղադրվում են յուրաքանչյուր անիվի վրա, առևտրային տրանսպորտային միջոցների և բեռնատարների վրա, սենսորները կարող են տեղադրվել ինչպես բոլոր անիվների վրա, այնպես էլ շարժիչ առանցքների դիֆերենցիալներում (մեկը մեկ առանցքի վրա):Այսպիսով, հակաբլոկային արգելակման համակարգերը կարող են վերահսկել բոլոր անիվների կամ շարժիչ առանցքների անիվների վիճակը և այդ տեղեկատվության հիման վրա փոփոխություններ կատարել արգելակման համակարգի աշխատանքի մեջ:
ABS սենսորների տեսակները
Բոլոր գոյություն ունեցող DSA-ները բաժանված են երկու մեծ խմբի.
• Պասիվ – ինդուկտիվ;
• Ակտիվ — մագնիսական դիմադրողական և հիմնված Hall սենսորների վրա:
Պասիվ սենսորները չեն պահանջում արտաքին էլեկտրամատակարարում և ունեն ամենապարզ դիզայնը, սակայն ունեն ցածր ճշգրտություն և մի շարք թերություններ, ուստի այսօր դրանք քիչ են օգտագործվում:Ակտիվ ABS սենսորները աշխատելու համար հոսանքի կարիք ունեն, որոշ չափով ավելի բարդ են դիզայնով և ավելի թանկ, բայց ապահովում են ամենաճշգրիտ ընթերցումները և հուսալի են շահագործման մեջ:Հետեւաբար, այսօր ակտիվ սենսորները տեղադրված են մեքենաների մեծ մասի վրա:
Բոլոր տեսակի DSA-ն ունի երկու տարբերակ.
• Ուղիղ (վերջ);
•Անկյուն.
Ուղղակի սենսորները ունեն գլան կամ գավազան, որի մի ծայրում տեղադրված է զգայական տարր, մյուսում `միակցիչ կամ մետաղալար միակցիչով:Անկյունային սենսորները հագեցված են անկյունային միակցիչով կամ միակցիչով մետաղալարով, ինչպես նաև ունեն պլաստմասե կամ մետաղական փակագիծ՝ պտուտակի անցքով:
ABS ինդուկտիվ սենսորների նախագծում և շահագործում
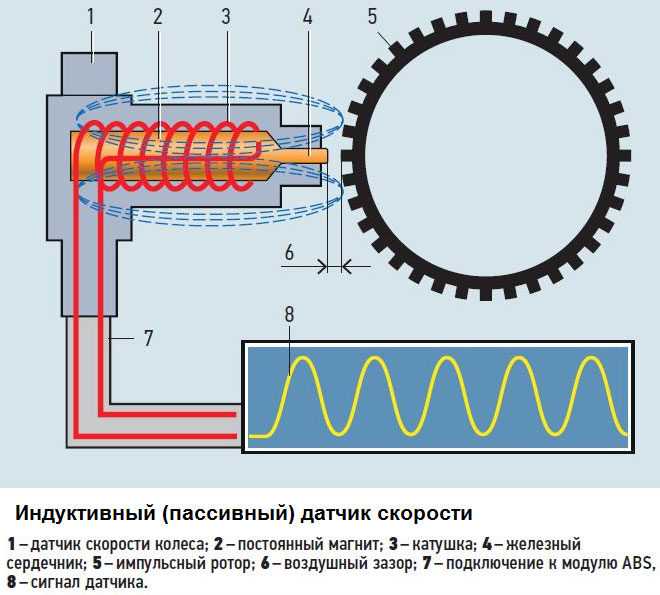
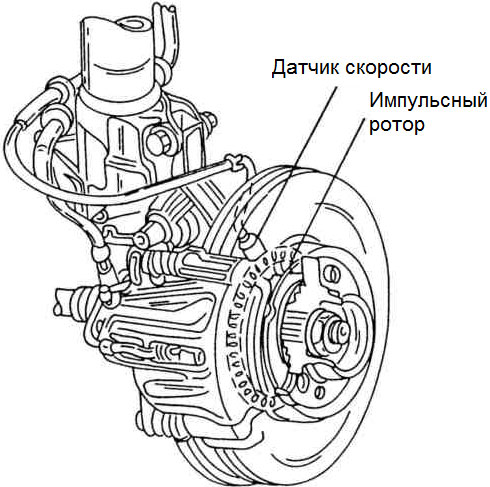
Սա արագության ամենապարզ սենսորն է դիզայնի և շահագործման մեջ:Այն հիմնված է բարակ պղնձե մետաղալարով ինդուկտորային վերքի վրա, որի ներսում կա բավականին հզոր մշտական մագնիս և երկաթյա մագնիսական միջուկ։Մագնիսական միջուկով կծիկի վերջը գտնվում է մետաղական փոխանցման անիվի (զարկերակային ռոտոր) դիմաց, կոշտորեն տեղադրված անիվի հանգույցի վրա:Ռոտորային ատամները ունեն ուղղանկյուն պրոֆիլ, ատամների միջև հեռավորությունը հավասար է կամ մի փոքր ավելի մեծ է, քան դրանց լայնությունը:
Այս սենսորի աշխատանքը հիմնված է էլեկտրամագնիսական ինդուկցիայի ֆենոմենի վրա։Հանգստի ժամանակ սենսորային կծիկում հոսանք չկա, քանի որ այն շրջապատված է մշտական մագնիսական դաշտով. սենսորի ելքի վրա ազդանշան չկա:Մինչ մեքենան շարժվում է, իմպուլսային ռոտորի ատամներն անցնում են սենսորի մագնիսական միջուկի մոտով, ինչը հանգեցնում է կծիկի միջով անցնող մագնիսական դաշտի փոփոխության։Արդյունքում մագնիսական դաշտը դառնում է փոփոխական, որը, ըստ էլեկտրամագնիսական ինդուկցիայի օրենքի, կծիկի մեջ առաջացնում է փոփոխական հոսանք։Այս հոսանքը տատանվում է սինուսի օրենքի համաձայն, իսկ հոսանքի փոփոխության հաճախականությունը կախված է ռոտորի պտտման արագությունից, այսինքն՝ մեքենայի արագությունից։
Ինդուկտիվ արագության տվիչները զգալի թերություններ ունեն՝ նրանք սկսում են աշխատել միայն այն ժամանակ, երբ որոշակի արագությունը հաղթահարվում է և թույլ ազդանշան են կազմում:Սա անհնար է դարձնում ABS-ի և այլ համակարգերի աշխատանքը ցածր արագությամբ և հաճախ հանգեցնում է սխալների:Հետևաբար, ինդուկտիվ տիպի պասիվ DSA-ներն այսօր իրենց տեղը զիջում են ավելի առաջադեմ ակտիվներին։
Արագության սենսորների նախագծում և շահագործում Hall տարրի հիման վրա
Hall-ի տարրերի վրա հիմնված տվիչները ամենատարածվածն են իրենց պարզության և հուսալիության շնորհիվ:Դրանք հիմնված են Hall էֆեկտի վրա՝ լայնակի պոտենցիալ տարբերության առաջացում մագնիսական դաշտում տեղադրված հարթ հաղորդիչում։Նման հաղորդիչը միկրոշրջանում տեղադրված քառակուսի մետաղական ափսե է (Hall ինտեգրված միացում), որը պարունակում է նաև գնահատող էլեկտրոնային միացում, որը առաջացնում է թվային ազդանշան:Այս չիպը տեղադրված է արագության սենսորում:
Կառուցվածքային առումով, Hall տարրով DSA-ն պարզ է. այն հիմնված է միկրոսխեմայի վրա, որի հետևում մշտական մագնիս է, և շուրջը կարող է տեղակայվել մետաղական թիթեղ-մագնիսական միջուկ:Այս ամենը տեղադրված է պատյանի մեջ, որի հետևի մասում կա էլեկտրական միակցիչ կամ միակցիչով հաղորդիչ։Սենսորը գտնվում է իմպուլսային ռոտորի դիմաց, որը կարող է պատրաստվել կամ մետաղական հանդերձանքի կամ մագնիսացված հատվածներով օղակի տեսքով, իմպուլսային ռոտորը կոշտորեն տեղադրված է անիվի հանգույցի վրա:

Hall սենսորի շահագործման սկզբունքը հետևյալն է.Hall-ի ինտեգրված սխեման մշտապես առաջացնում է թվային ազդանշան որոշակի հաճախականության քառակուսի իմպուլսների տեսքով:Հանգստի ժամանակ այս ազդանշանն ունի նվազագույն հաճախականություն կամ իսպառ բացակայում է:Մեքենայի շարժման սկզբում մագնիսացված հատվածները կամ ռոտորի ատամները անցնում են սենսորի կողքով, ինչը ենթադրում է սենսորի հոսանքի փոփոխություն. այս փոփոխությունը վերահսկվում է գնահատման սխեմայի կողմից, որն առաջացնում է ելքային ազդանշան:Զարկերակային ազդանշանի հաճախականությունը կախված է անիվի պտտման արագությունից, որն օգտագործվում է հակաբլոկային արգելակման համակարգի կողմից:
Այս տեսակի DSA-ն զուրկ է ինդուկտիվ սենսորների թերություններից, դրանք թույլ են տալիս չափել անիվների պտտման արագությունը բառացիորեն մեքենայի շարժման առաջին սանտիմետրերից, ճշգրիտ և հուսալի են շահագործման մեջ:
Անիզոտրոպ մագնիսական դիմադրողական արագության տվիչների նախագծում և շահագործում
Մագնիսական դիմադրողական արագության տվիչները հիմնված են անիզոտրոպ մագնիսական դիմադրողական էֆեկտի վրա, որը ֆերոմագնիսական նյութերի էլեկտրական դիմադրության փոփոխությունն է, երբ դրանց կողմնորոշումը փոխվում է մշտական մագնիսական դաշտի համեմատ:
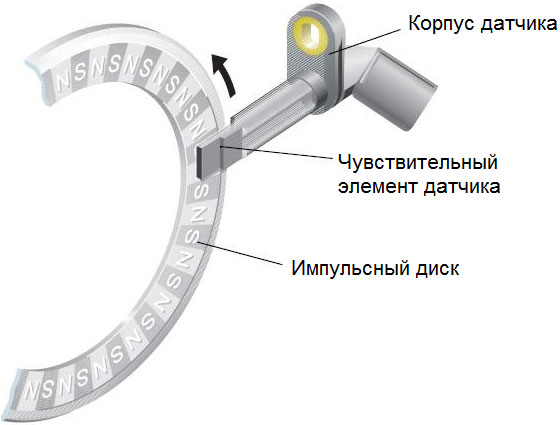
Սենսորի զգայուն տարրը երկու-չորս բարակ հավերժաձև թիթեղներից (երկաթ-նիկելային հատուկ համաձուլվածք) «շերտային թխվածք» է, որի վրա կիրառվում են մետաղական հաղորդիչներ՝ որոշակի ձևով բաշխելով մագնիսական դաշտի գծերը։Թիթեղները և հաղորդիչները տեղադրվում են ինտեգրալ սխեմայի մեջ, որտեղ նաև գտնվում է գնահատման սխեման՝ ելքային ազդանշանը ձևավորելու համար:Այս չիպը տեղադրված է զարկերակային ռոտորի դիմաց գտնվող սենսորի մեջ՝ մագնիսացված հատվածներով պլաստիկ օղակ:Օղակը կոշտ ամրացված է անիվի հանգույցի վրա:
AMR սենսորների աշխատանքը հանգում է հետևյալին.Հանգստի ժամանակ սենսորի ֆերոմագնիսական թիթեղների դիմադրությունը մնում է անփոփոխ, ուստի ինտեգրված սխեմայի կողմից առաջացած ելքային ազդանշանը նույնպես չի փոխվում կամ ամբողջովին բացակայում է:Մինչ մեքենան շարժվում է, զարկերակային օղակի մագնիսացված հատվածները անցնում են սենսորային զգայական տարրի կողքով, ինչը հանգեցնում է մագնիսական դաշտի գծերի ուղղության որոշակի փոփոխության:Սա առաջացնում է հավերժական խառնուրդի թիթեղների դիմադրության փոփոխություն, որը վերահսկվում է գնահատման սխեմայի կողմից - արդյունքում սենսորի ելքում առաջանում է իմպուլսային թվային ազդանշան, որի հաճախականությունը համաչափ է մեքենայի արագությանը:
Հարկ է նշել, որ մագնիսական դիմադրողական սենսորները թույլ են տալիս հետևել ոչ միայն անիվների պտտման արագությանը, այլև դրանց պտտման ուղղությանը և կանգառի պահին:Սա հնարավոր է մագնիսացված հատվածներով իմպուլսային ռոտորի առկայության պատճառով. սենսորը վերահսկում է ոչ միայն մագնիսական դաշտի ուղղության փոփոխությունը, այլև մագնիսական բևեռների անցման հաջորդականությունը զգայող տարրից:
Այս տեսակի DSA-ները ամենահուսալին են, դրանք ապահովում են բարձր ճշգրտություն անիվների պտտման արագության չափման և տրանսպորտային միջոցների անվտանգության ակտիվ համակարգերի արդյունավետ աշխատանքի մեջ:
Արագության սենսորների շահագործման ընդհանուր սկզբունքը որպես ABS և այլ համակարգերի մաս
Հակակողպման արգելակման համակարգերը, անկախ դրանցում տեղադրված սենսորներից, գործում են նույն սկզբունքով։ABS կառավարման միավորը վերահսկում է արագության սենսորներից եկող ազդանշանը և համեմատում այն մեքենայի արագության և արագացման նախապես հաշվարկված ցուցիչների հետ (այս ցուցանիշները անհատական են յուրաքանչյուր մեքենայի համար):Եթե սենսորից ստացվող ազդանշանը և կառավարման միավորում գրանցված պարամետրերը համընկնում են, ապա համակարգը անգործուն է:Եթե մեկ կամ մի քանի սենսորների ազդանշանը շեղվում է դիզայնի պարամետրերից (այսինքն՝ անիվները արգելափակված են), ապա համակարգը ներառված է արգելակման համակարգում՝ կանխելով անիվների կողպման բացասական հետևանքները։
Հակակողպման արգելակման և մեքենայի անվտանգության այլ ակտիվ համակարգերի շահագործման մասին լրացուցիչ տեղեկություններ կարելի է գտնել կայքի այլ հոդվածներում:
Հրապարակման ժամանակը՝ օգոստոսի 24-2023